上分宝:值得大家信赖的下载网站!
时间:2023-03-21 13:52:23来源:互联网
网上有很多关于组装机器人玩具,组装机器人游戏的知识,也有很多人为大家解答关于组装机器人的问题,今天上分宝游戏网为大家整理了关于这方面的知识,让我们一起来看下吧!
1、组装机器人
3、机器人建造过程

两个正在工作的原型组装机器人,它们将一系列称为体素的小单元组装成一个较大的结构
麻省理工学院博士生本杰明·杰内特(Benjamin Jenett)和原子中心的尼尔·格申费尔德教授(Neil Gershenfeld)在《电气电子工程师学会机器人与自动化快报》科学期刊上发表报告称,开发出一种组装机器人原型,它可以用很小的零件制成大型结构。这种小型机器人系统可能有一天会建造从飞机到太空定居点的高性能结构。

麻省理工学院博士生本杰明·杰内特
以飞机制造为例,如今的商用飞机一般是分节制造的,通常是在不同的位置制造–一个工厂的机翼,另一个工厂的机身部分,其他地方的尾翼部件–然后空运到大型货运飞机的中央工厂进行最终组装。但是,如果最后的装配是唯一的装配,而整个飞机是由大量细小的相同零件组成,并且全部由一群微型机器人组成的,那该怎么办呢?组装机器人的原型版本可以解决这种难题,它可以组装小型结构,甚至可以作为一个团队一起构建更大的组件。
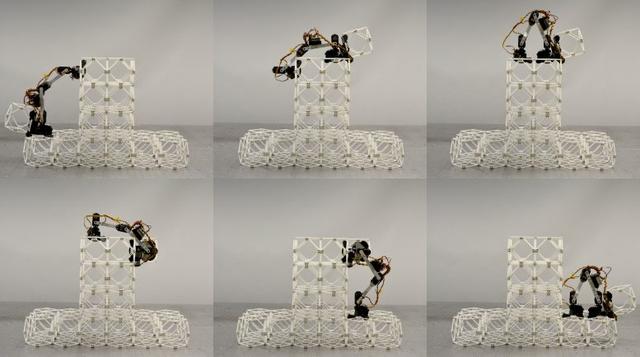
图片序列显示了一个组装机器人在工作,在一个正在施工的结构的另一侧上方和下方承载一个结构单元
休斯敦大学电气与计算机工程副教授亚伦·贝克尔(Aaron Becker)说:“这种机器人结合了一流的机械设计,令人叹为观止的演示,它的硬件包含超过100000个元素的仿真套件。其核心是一种我们称为相对机器人的技术。”
从历史上看,机器人技术分为两大类:一类是由昂贵的定制组件制成的,这些组件针对诸如工厂组装之类的特殊应用进行了精心优化,而另一类则是由廉价,批量生产且性能低得多的模块制成。但是,麻省理工学院科学家开发的这种新机器人可以替代这两种机器人。它比第一种机器人要简单得多,而且要比后者要强大得多,并且它有可能彻底改变大型系统的生产,从飞机到桥梁再到整个建筑物。

尼尔·格申费尔德教授
格申费尔德教授表示,核心区别在于机器人设备与其所处理和操纵的材料之间的关系。有了这些新型的机器人,无法将机器人与结构分开,它们可以作为一个系统协同工作。” 比如,尽管大多数移动机器人都需要高度精确的导航系统来跟踪其位置,但是新的组装机器人只需要跟踪它们相对于当前正在工作的称为子像素的小型子单元的位置。机器人每踏入下一个体素时,都会始终根据其当前站立的特定组件重新调整其位置感。
这样做的一个好处是,就像可以通过使用屏幕上的像素阵列来复制最复杂的图像一样,几乎任何物理对象都可以作为较小的三维碎片或体素的阵列来重建,而这些三维碎片或体素可以自己制作简单的支柱和节点。
该团队证明,可以布置这些简单的组件来有效地分配负载。它们主要由开放空间组成,因此结构的总重量最小。可以通过简单的组装器将这些单元拾起并放置在彼此相邻的位置,然后使用内置在每个体素中的闩锁系统将其固定在一起。
机器人本身就像一个小臂,中间有两个长节,两个长节铰接在一起,每个末端都有用于夹持在体素结构上的设备。这些简单的设备像蠕虫一样四处移动,通过反复打开和关闭其V形主体,从一个移到另一个,沿着一排体素前进。杰内特称其为小型机器人BILL-E(双足各向同形运动探测器)。
原型组装机器人的工作动画
杰内特已构建了几种版本的组装器作为概念验证设计,以及具有锁定机制的相应体素设计,可以轻松地将每个组装者与邻居分离或组装。他使用这些原型演示了将块组装为线性,二维和三维结构的过程。他说:“我们没有把精度放在机器人上,精度来自结构,因为它逐渐成形。这不同于所有其它机器人。它只需要知道下一步在哪里。”
格申费尔德教授说,在组装零件时,每个微型机器人都可以算出其在结构上的台阶数。他说,除了导航之外,这还使机器人可以在每个步骤中纠正错误,从而消除了传统机器人系统的大部分复杂性。他说:“它缺少了大多数常用的控制系统,但是只要不遗漏任何步骤,它就知道它在哪里。”对于实际的装配应用,由于这些组件的大量出现,它们可以一起工作以加快过程。 科学家还开发的控制软件,可以使机器人协调工作并避免互相干扰。
这种使用简单的机器人系统、由相同子单元组装大型结构的方法,就像小孩子从乐高积木中组装大型城堡一样,已经引起了一些潜在用户的兴趣,包括美国宇航局,空中客车公司赞助了这项研究。
这种组装机器人的一个优点可以通过与初始组装相同的机器人工艺轻松地进行维修。损坏的部分可以从结构上拆卸下来,并用新的部分替换,从而产生与原始结构一样坚固的结构。格申费尔德教授说:“拆建与建造同等重要。”随着时间的流逝,这一设计还可用于对系统进行修改或改进。对于空间站或月球栖息地,这些机器人将居住在结构上,不断对其进行维护和修理。
格申费尔德教授认为,最终,这种系统可以用来建造整个建筑物,特别是在太空,月球或火星等困难环境中。它可以消除从地面一直运送大型预组装结构的需要。取而代之的是,可以发送大批微小的子单元,或使用可以在最终目的地,利用当地材料将这些子单元制造出来的系统。
德国不伦瑞克工业大学操作系统和计算机网络研究所所长桑德尔·费克特(Sandor Fekete)说:“诸如此类的超轻数字材料为构建高效,复杂的系统提供了令人惊叹的方法。大型结构在航空航天应用中至关重要。”
但费克特认为,组装这样的系统是一个挑战,他计划加入麻省理工学院的研究团队,以进一步开发控制系统。
费克特说:“这是使用小型和简单的机器人有望带来下一个突破的地方:机器人不会感到疲劳或无聊,而使用许多微型机器人似乎是完成这一关键任务的唯一方法。杰内特的团队所做的这项极其原始而巧妙的工作,使人们朝着动态调节飞机机翼,制造巨大的太阳帆乃至可重构太空栖息地迈出了一大步。”
格申费尔德教授表示:“在此过程中,我们觉得自己正在探索混合材料机器人系统的新领域。”
如果是买的现成的机器人套装,一定带有组装说明书,按照说明书一步一步顺序走下去就能顺利组装成功的。
如果丢失了说明书,则需要你分析组装了。对于人性机器人,必须从脚、小腿、大腿、手、手臂,前些枝干的组装要注意电控引线的位置。身躯、腿和手臂与身躯组装,最后身躯的前后电池板和控制电路板,最后头,安装控制板的时候注意驱赶引线与控制板的连接以及固定方法。
最后再接入电源部分,接电源一定要注意不要接反了和有无短路现象。最好再开电源时串接电流表,观察电流情况,在机器人没有运动情况下的总电流应该在百mA数量级,运动时可以达到或超过A级试试。
工具或原料:电池端子--2 个;滚柱罩--红色的滚柱罩可以在混乱的活动中避免闩锁臂飞出。闩锁臂和滚柱罩都是宽松地安装在黄色底座的槽中的;电路板--微控制器和简单的电路板;锂离子电池则在电路板下面。
通讯线圈--通讯线圈在其下面;接口--在电路板和电磁驱动器与通讯线圈之间的接口;铜箔--我们用的是背面有粘性的铜箔,用切割机切成标签的形状,将它粘在塑料上; 线圈和磁铁--置于黄色底座中的电磁线圈,以及插入红色闩锁臂的稀土磁铁。
通讯线圈--下面有通讯线圈,和表面平齐;闩锁--别的机器人要钩住这个机器人的话,就要靠这个闩锁;闩锁钩--抓住其他机器人所用的闩锁钩;底座--激光切割的丙烯酸(亚克力)底座,黄色的部分厚度为 3/16 英寸,用胶水粘在底部的厚 1/16 英寸的透明丙烯酸塑料板上。
制作印刷电路板(PCB) PCB 是通过Eagle PCB 设计软件进行设计的。Gerber 文件可以直接发送到 PCB 制作服务,制作出电路板来。还附上了面板化的 gerber 文件,这个版本将机器人的 PCB 分成了 16 块面板,让制造的效率更高,成本更低。
采用体积非常小的表面封装(SMT)元件,并得以把一个微控制器、10 支表示状态的发光二极管、4 个用于驱动执行机构的场效应晶体管,以及编程/电力接头布置在了一块 25 毫米 × 25 毫米的电路板上,上面还配备了供 4 个执行机构和 4 个传感器连接的接触点。
组装电路。
机器人带有两个电磁驱动的闩锁。红色的闩锁臂压装有一个 3 毫米的立方体磁铁(NdFeB 类型),而黄色的机器人底座压装有一个圆柱线圈。这些线圈都是根据以下规格自信制备的:700 匝 42 口径的线圈线,长 4 毫米,缠绕在一个直径 2 毫米的轴上。制作出来的线圈外径大约为 4 毫米,内径大约为 2 毫米。
制作印刷电路板;在印刷电路板上布置元件;对微控制器进行编程;制作机器人的塑料零件;组装机器人的塑料零件;在机器人的架构中组装磁体;在机器人的架构中组装电子器件;测试。
在完成初步的概念设计以后,接下来就进入挑选所需装置与零件的阶段。需要选用的零件包含:驱动器、动力源、控制板、马达控制器和感知器等等。我们建议刚入门的的玩家,从驱动器开始挑选。例如直流马达、伺服机等。接下来,再选择可以和驱动器搭配的控制板及驱动器控制板,最后是感知器,像是摄影机、超声波测距仪等等装置。
※零件选用小提示:
1. 在选择驱动器时,要先确认机器人所需要的规格。像是力量输出、制动方式等。这类讯息可以由网络搜搜和孙寻,以及从驱动器的规格书上找到。
2. 选用市面上普及的零件。由于在机器人制作的过程中,很常会遇到问题,而普及常用的的零件因为用户多,较容易由网站、社群、坊间书籍或玩家团体中获得支持。
3. 在动力来源部分,建议使用高电容量、并能维持输出1安培电流的充电电池。
三、机器人组装
在凑齐了所有需要的零件和装置之后,接下来我们将要把机器人制作出来。这个阶段主要着重在两个部分:机器人的骨架结构设计与制作,以及将所有零件和装置装配起来。
组装中的机器人
骨架结构的设计与制作看似直觉,却经常是制作机器人过程中最耗时费工的阶段。坊间有各式各样的材料可以选用,一如前文所提的KISS法则,尽量选择易获得、好加工又具有一定刚性的材料来制作结构体,像是瓦楞纸、木材、金属薄板或是3D打印等。如果可以,好好地应用3D绘图软件来协助设计,它可以帮助我们更直觉的看到最终成品的外观,也同时能够省下许多尝试错误的时间。
由于是入门机器人制作,这里暂时先不把工业产品设棚手计的程序考虑进来,也就是「世链将脑中的雏型概念可视化、制图、制作样品,直到最终完成成品」这样的一个流程。同时,机器人的外观,在现阶段也先不用太过在意。
四、程控机器人
最后一个步骤,也是为机器人开光点眼、注入灵魂的关键步骤,就是将程序烧入机器人的芯片中。在完成这个步骤之前的机器人,我们只可以将它视为一台昂贵的玩具。要能完成这个步骤,有需要具备另一大块的技术能力――对机器人控制的知识,还有计算机程序编写的技能。这部分的知识可以从网站、社群和书籍中获得;市售的控制板一般也会提供人机软件接口,供开发者使用。
撰写程控机器人(来源:Fizzics Education)
结语:―千里之行,始于足下
上述的机器人制作步骤,是我们依据过去开发机器人的经验,并汇整其他玩家前辈心得所做出来的建议。相信您在成功完成了
乐高积木机器人的拼装技巧
1、首先我们需要准备出10个乐高积木,其中用来拼出机甲的颜色可以根据个人喜好来选择,但最好是我们以统一色来打造一个内外一致的机甲,这样它才显得更加协调统一。
2、然后,从机甲的底部开始,此时可以用三个乐高积木拼出4个脚,一般来说,这4个脚的高度要一致,才显得机甲有良好的平衡感。
3、紧跟着是头部,这里可以用三个乐高积木拼出一个头部的轮廓,头部的颜色要比其它部分更加明显,这样才能更好的与其它部分区分开来,从而使整台机甲更加有趣。
4、接着就是最重要的身体,机甲身体可以用3个乐高积木布局出一个曲折的形状,它可以跟头部结合起来,一起构成整台机甲的凝聚点,尽量多的布局出轮廓的细节,能让机甲显得更加生动有趣。
5、最后再布局出机甲的饰物,可以用一个乐高积木来拼出机甲的手臂或武器,这样机器人就大功告成
以上就是关于组装机器人玩具,组装机器人游戏的知识,后面我们会继续为大家整理关于组装机器人的知识,希望能够帮助到大家!
上海市初中学生综合素质评价登录入口
宝可梦属性克制表2024最新,18种属性克制关系
王者荣耀排位巅峰赛荣耀战力加分公式规则2024
魔塔50层攻略隐藏道具图解,魔塔50层详细图文攻略
美国zoom动物仙踪林详情介绍
重装机兵攻略隐藏物品图文详解,战车具体位置
推荐几款超污的手游游戏,6个很污的养成类游戏
希尔薇攻略
原神主c排行2023,4.2目前各系最强主c角色排名
action对魔忍
动作游戏
2233盒子
其他游戏
oppo助手2.0
其他游戏
touchitrikka
益智休闲
qq飞车测试服
赛车竞速
青云纪事
角色扮演
泰拉tmodloader
其他游戏
菜菜音乐盒
其他游戏
迷你世界老版本0.44.2版本
模拟经营
极乐园
聊天交友
湖北农村商业银行
金融理财
51品茶
交友约会
极乐园paradise
聊天交友
丝目
社交聊天
七点工具箱
工具应用
酷狗输入法(搜狗输入法)
常用工具
shopee东南亚跨境电商
境外购物
日本大阪usj
生活实用